Farm Robotics Challenge 2023
Elegance in Design Prize - 2023 Farm Robotics Challenge
Our team—Robo-ag—competed in the inaugural Farm Robotics Challenge hosted by the AI Institute for Next Generation Food Systems (AIFS), farm-ng, and UC ANR. We were honored to receive the Elegance in Design Prize for our autonomous targeted pesticide application system.

The Problem: Herbicide & Fertilizer Waste
Resource overuse is a significant challenge in modern agriculture. Traditional “blanket” spraying methods lead to:
- 70 million pounds of pesticide active ingredients wasted annually in the U.S.
- $1.4 billion in economic losses due to incorrect application.
- Environmental damage including eutrophication, harmful algal blooms, and soil acidification.
In our target 10-acre vineyard in Napa County, we aimed to transition from broad application to precise, targeted control to save costs and protect the environment.
Our Solution: Targeted Spray System
Utilizing the farm-ng Amiga robotic platform, we developed an autonomous spray applicator capable of delivering precise doses to specific plants.
Key Features:
- GPS-Guided Path Following: Leveraging onboard sensors and a line-following algorithm to navigate vineyard rows.
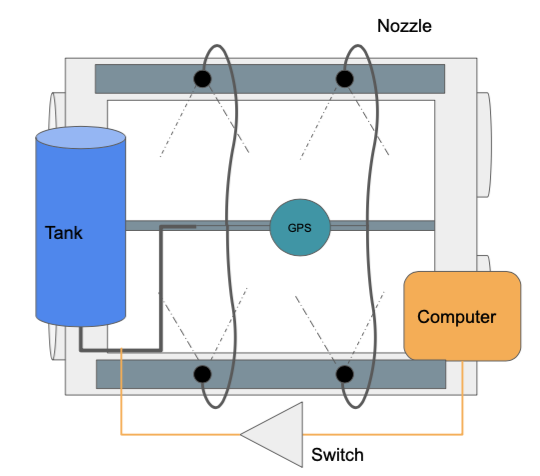
- Dynamic Spray Control: A self-pressurizing tank system with solenoid-controlled nozzles that activate only at defined points.
- Safety First: Integrated weather shields and automated system checks (GPS, pressure, battery) to ensure reliable operation.
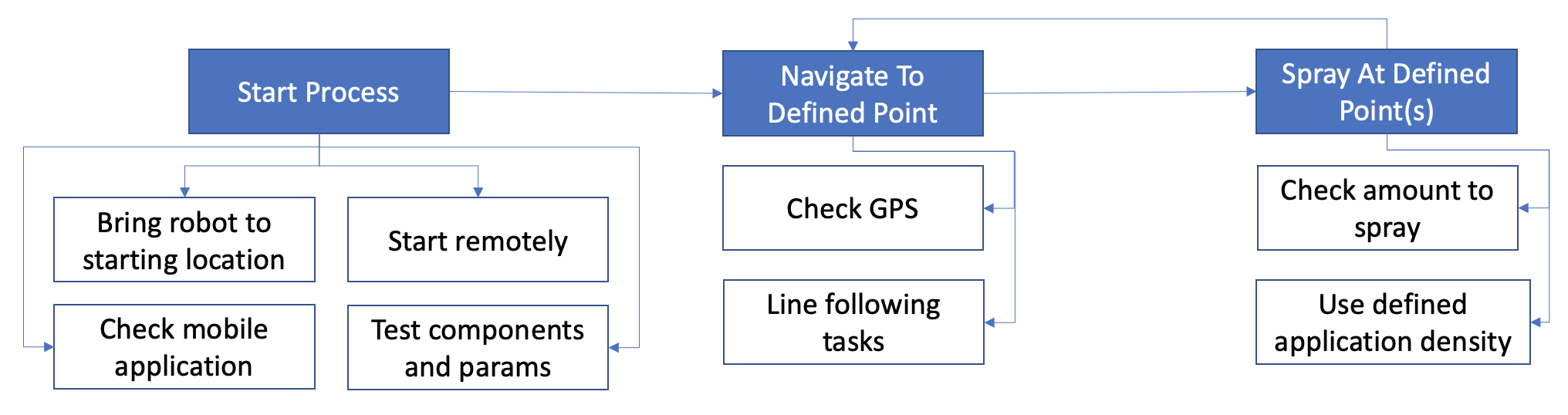
Technical Workflow (Navigate → Detect → Spray)
The robot’s operation follows a robust task hierarchy:
- Start & Test: Remote activation and automated subsystem diagnostics.
- Navigate: The Amiga uses GPS and line-following to maintain alignment within vineyard rows.
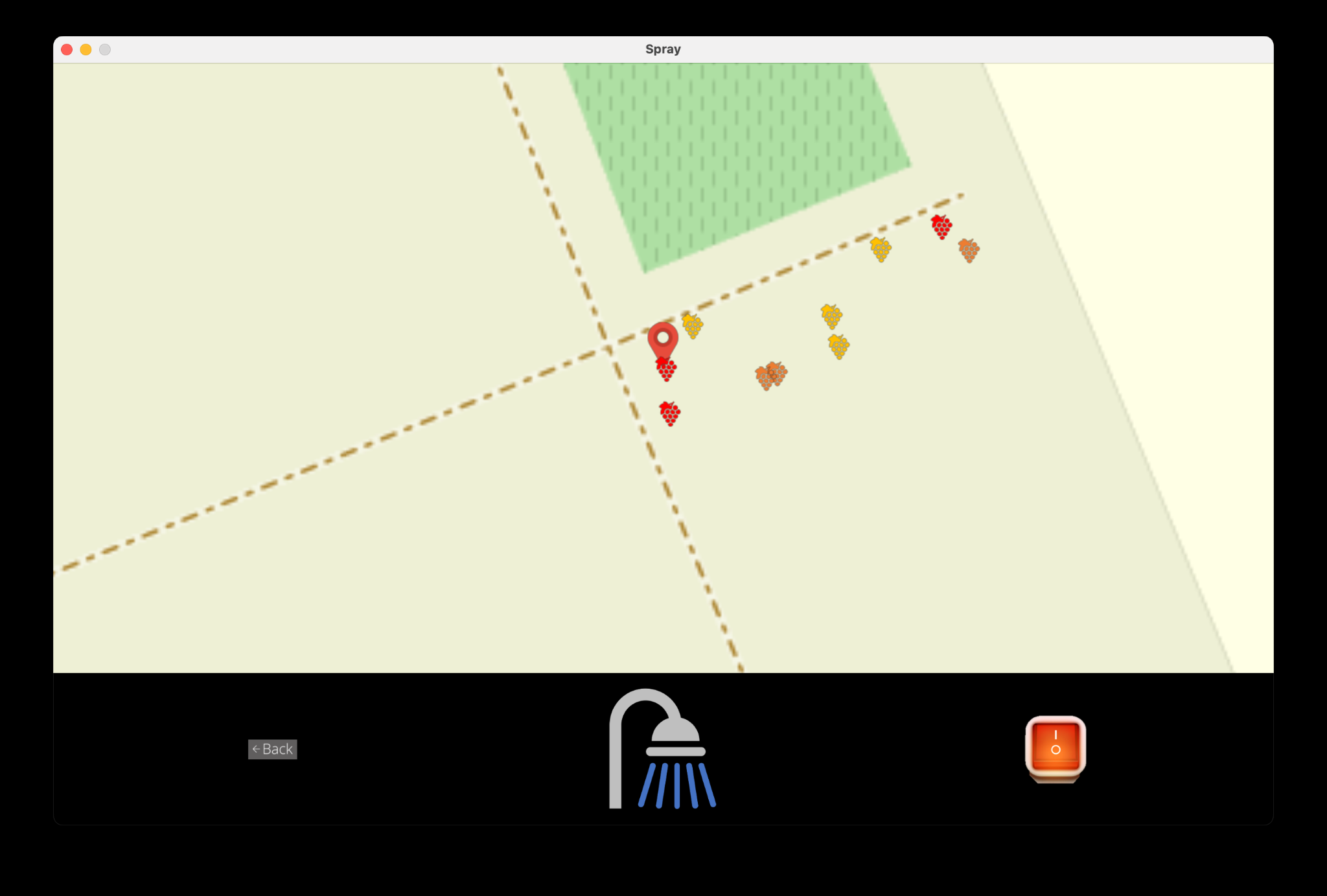
- Targeted Spray: The system cross-references real-time GPS coordinates with a pre-defined application map (JSON-based) to trigger the spray nozzles.
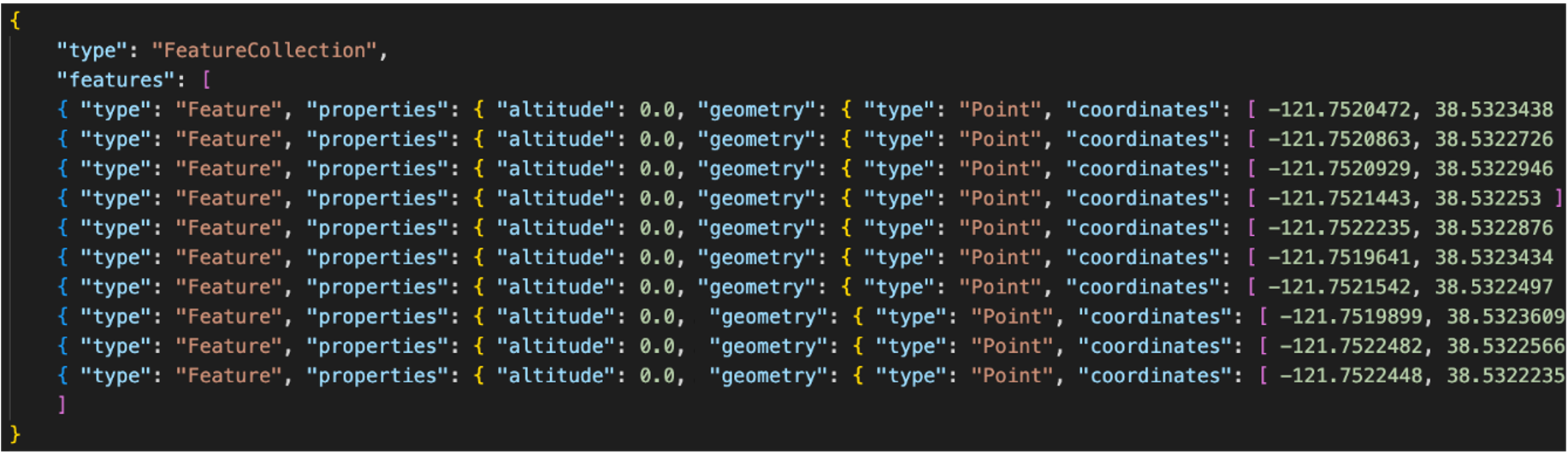
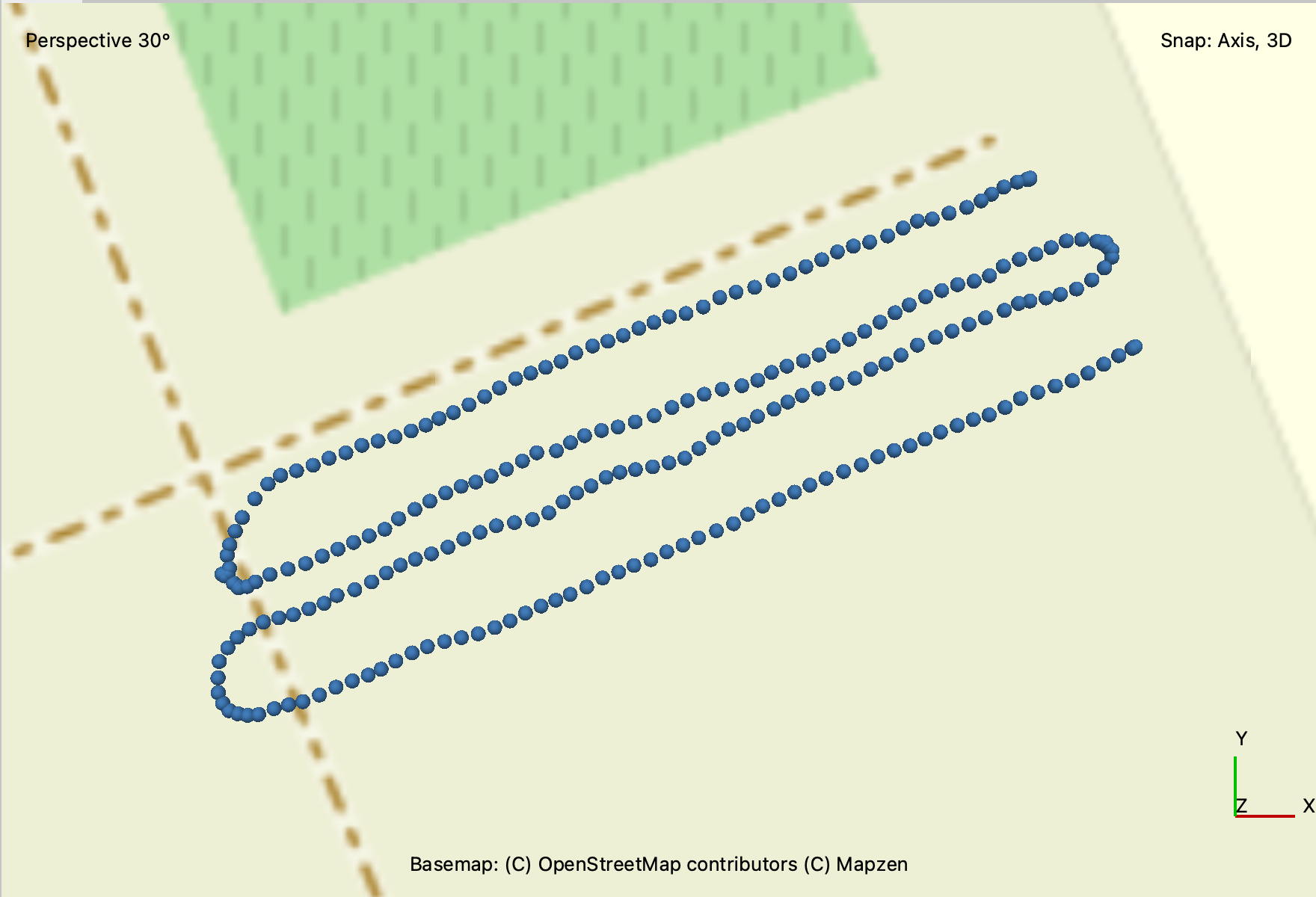
GPS Navigation & Data Mapping
To achieve high precision, we utilized GeoJSON-based application maps. The system tracks the robot’s current position and cross-references it with pre-defined spray points.
Impact
By moving from blanket application to targeted spraying, our system can:
- Reduce herbicide and fertilizer usage by up to 90% in many scenarios.
- Minimize manual labor required for scouting and application.
- Improve crop health by ensuring optimal nutrient delivery without over-exposure.